Mechanical Engineering at Auburn University, Graduating August 2026
Austin
Revera
Mechanical engineering student with hands-on experience building robots, CNC systems, embedded hardware, and control systems.

About
I am a mechanical engineering student at Auburn University graduating in August 2026, with experience across robotics, CNC systems, control systems, and additive manufacturing.
My projects span university research (WAAM slicer for ICAM), competition builds (BattleBot, DC motor), and personal passion projects (6-axis robot arm, MPCNC). I am drawn to problems that require both hardware and software thinking.
Currently seeking full-time opportunities in mechanical or systems engineering starting August 2026.
Projects
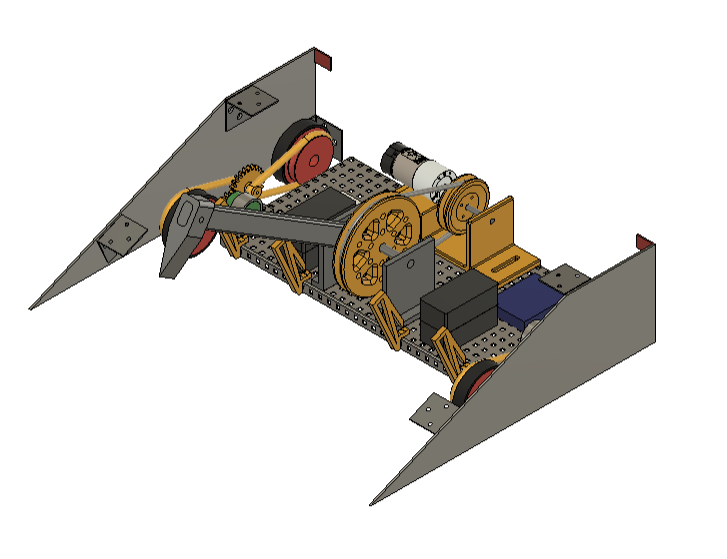
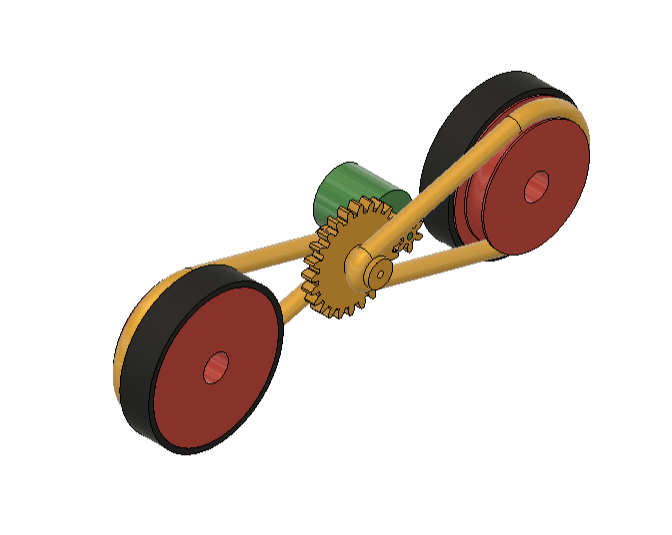
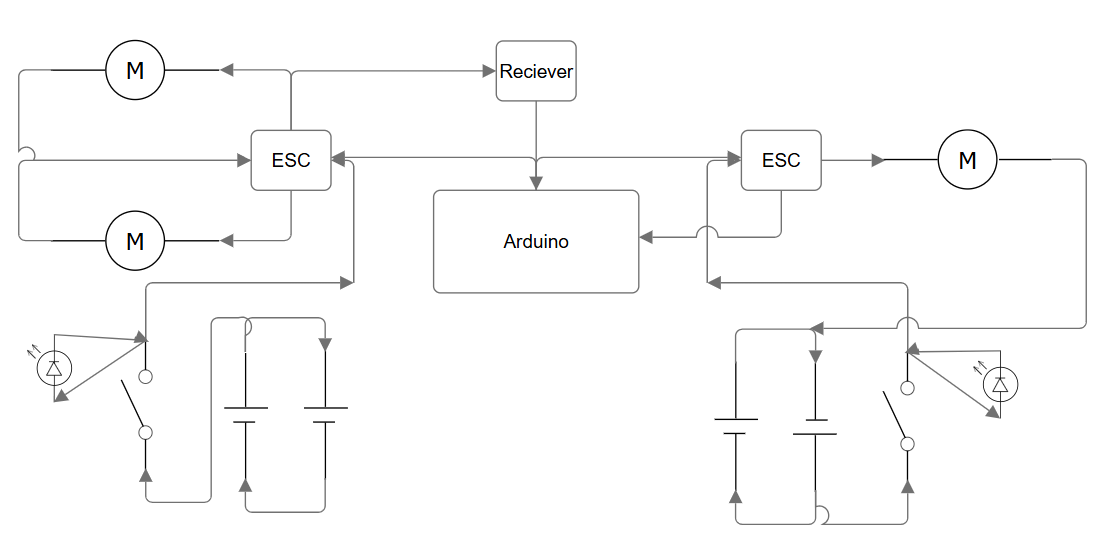
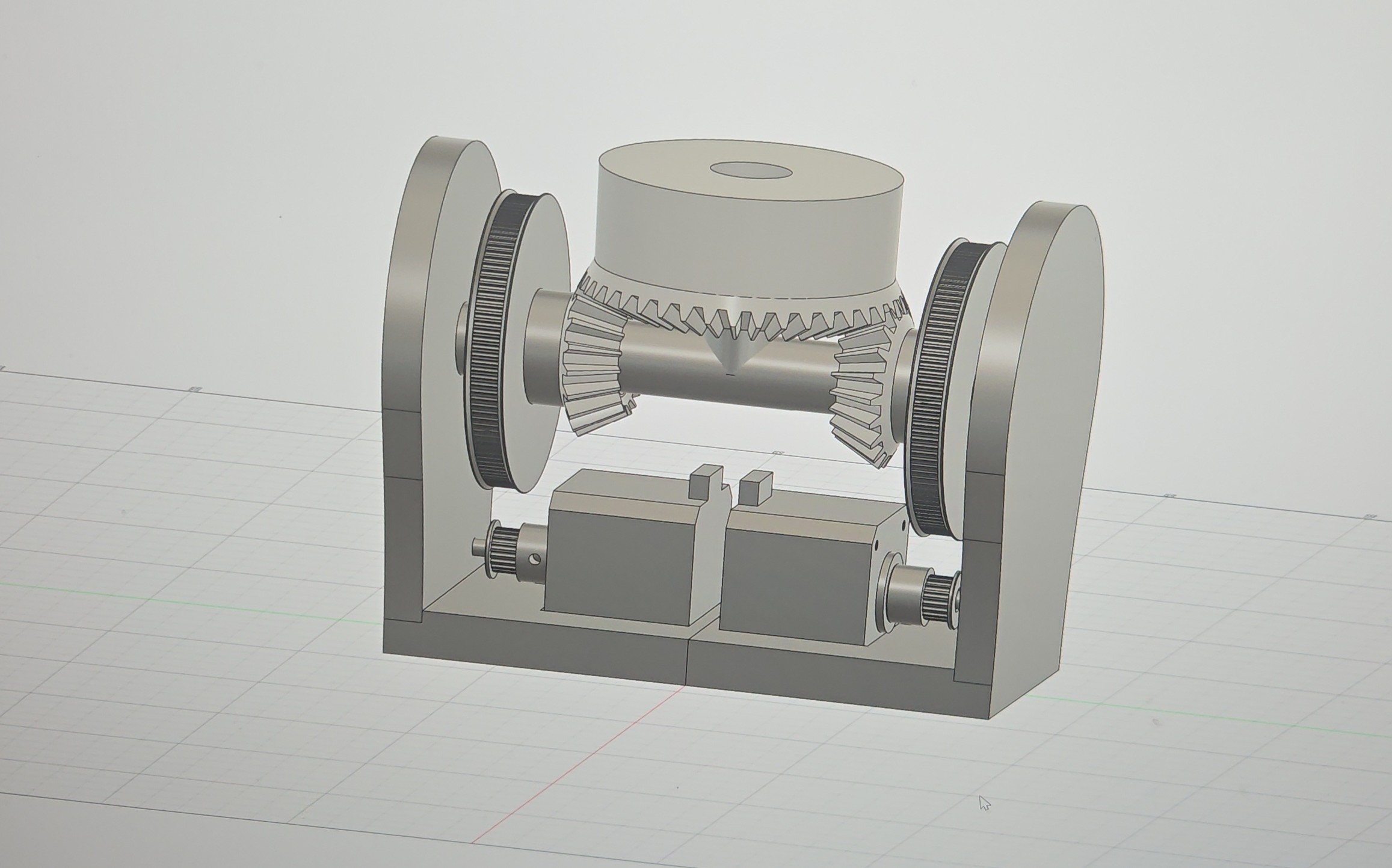
BattleBot
Senior design project: a sub $500, sub 12 lb combat robot built to defeat a rival university team. Features a dual drive system with an overhead axe weapon. Design complete and currently in the build phase.
6-Axis Robot Arm
Personal build of a full 6-axis robot arm (XYZ + ABC) using NEMA 23 steppers and 3D printed parts. Gear differential joints amplify torque. Currently Arduino based with an ESP32 web interface planned for completion.
WAAM Slicer
Custom slicer for ICAM's Wire Arc Additive Manufacturing research. Generates a weaving toolpath pattern for walls and interior fill. Built in Rhino3D and exports custom G-code for the in-house WAAM printer.
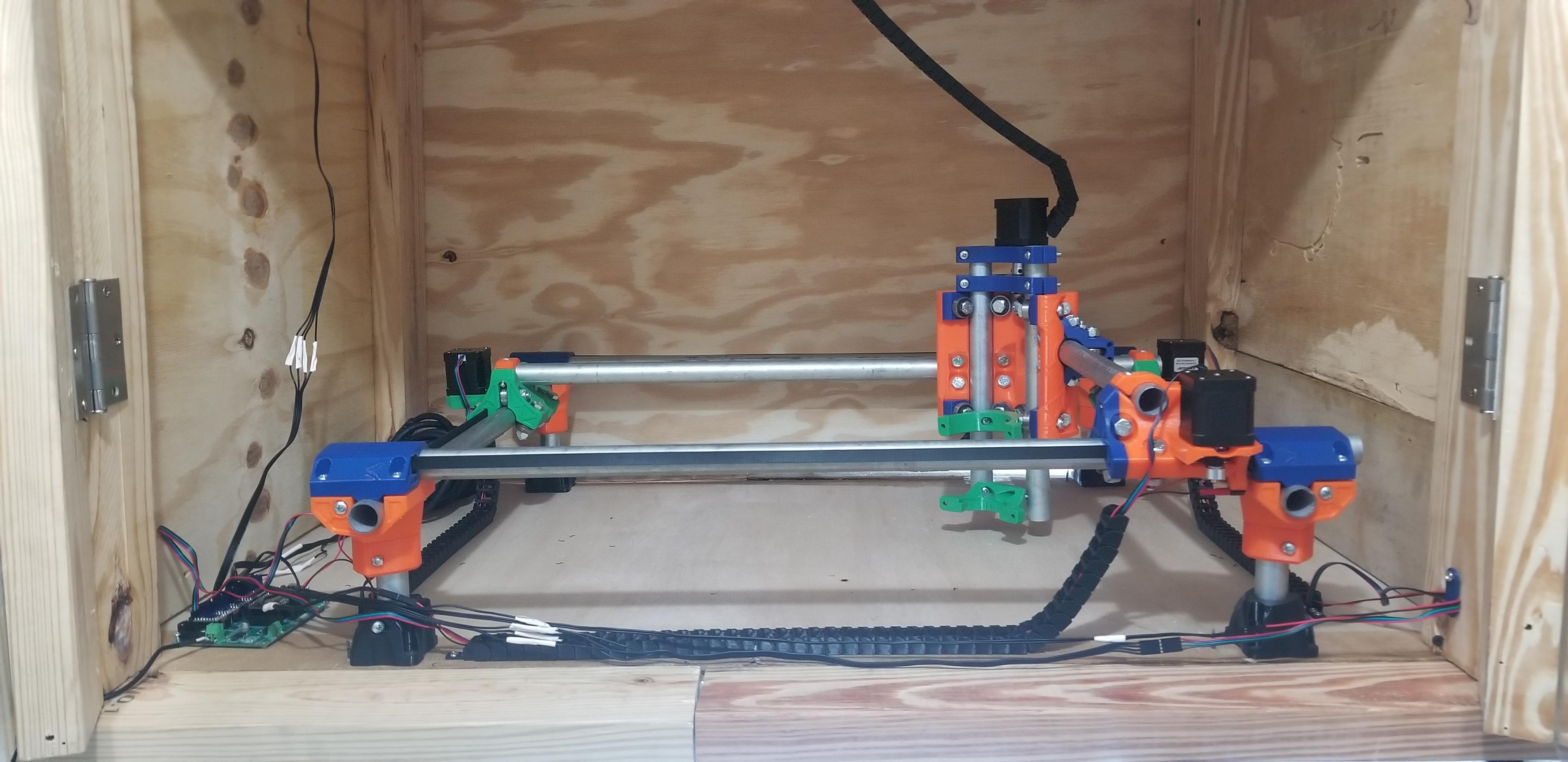
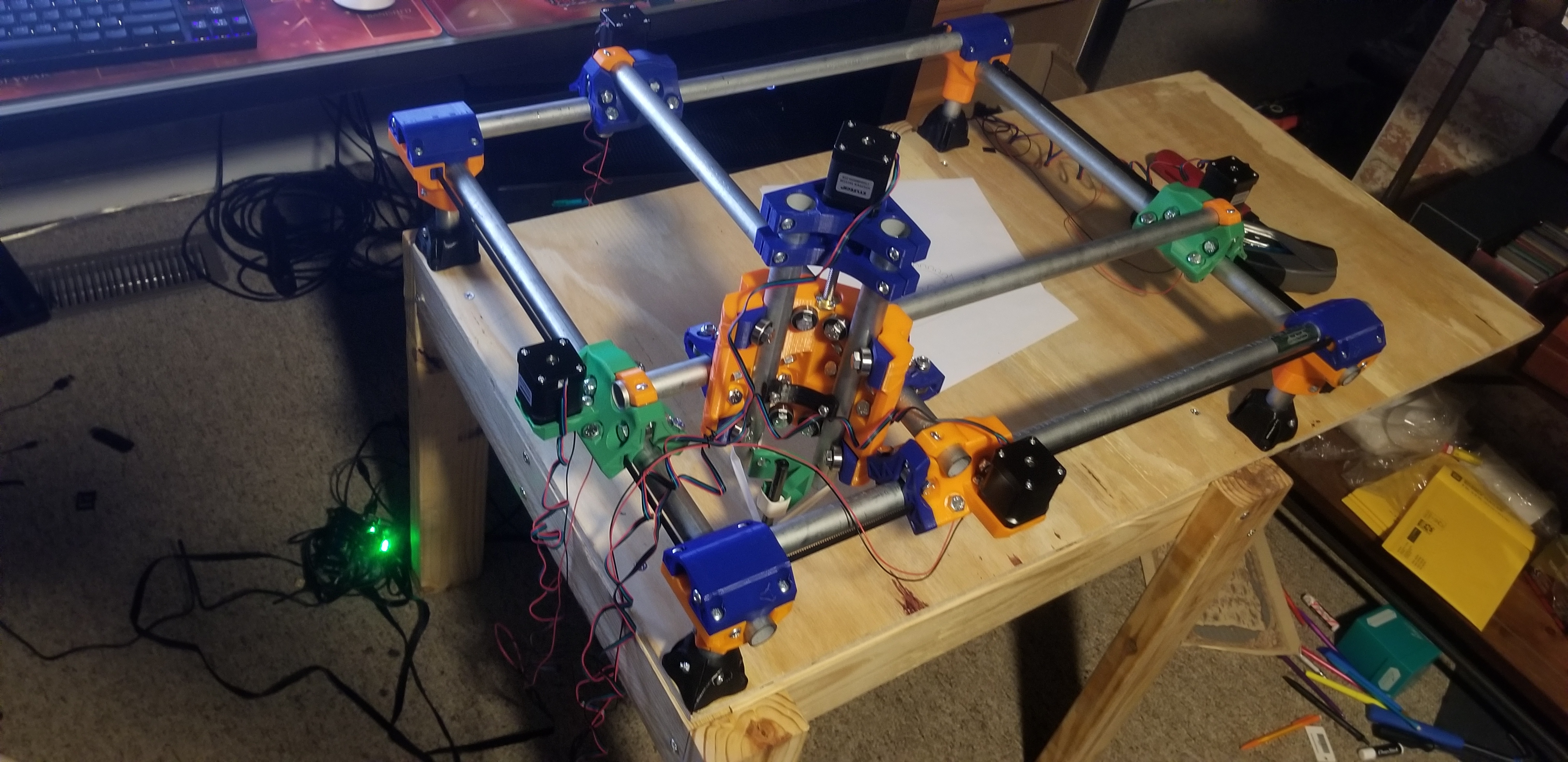
MPCNC Router
Mostly printed CNC based on the V1E MPCNC design with custom router modifications. Primary use is cutting topographic formboard maps of US states using depth from color in Fusion 360.
Stair Climber Robot
Autonomous robot designed to navigate a full staircase, including both concrete and marble stairs.
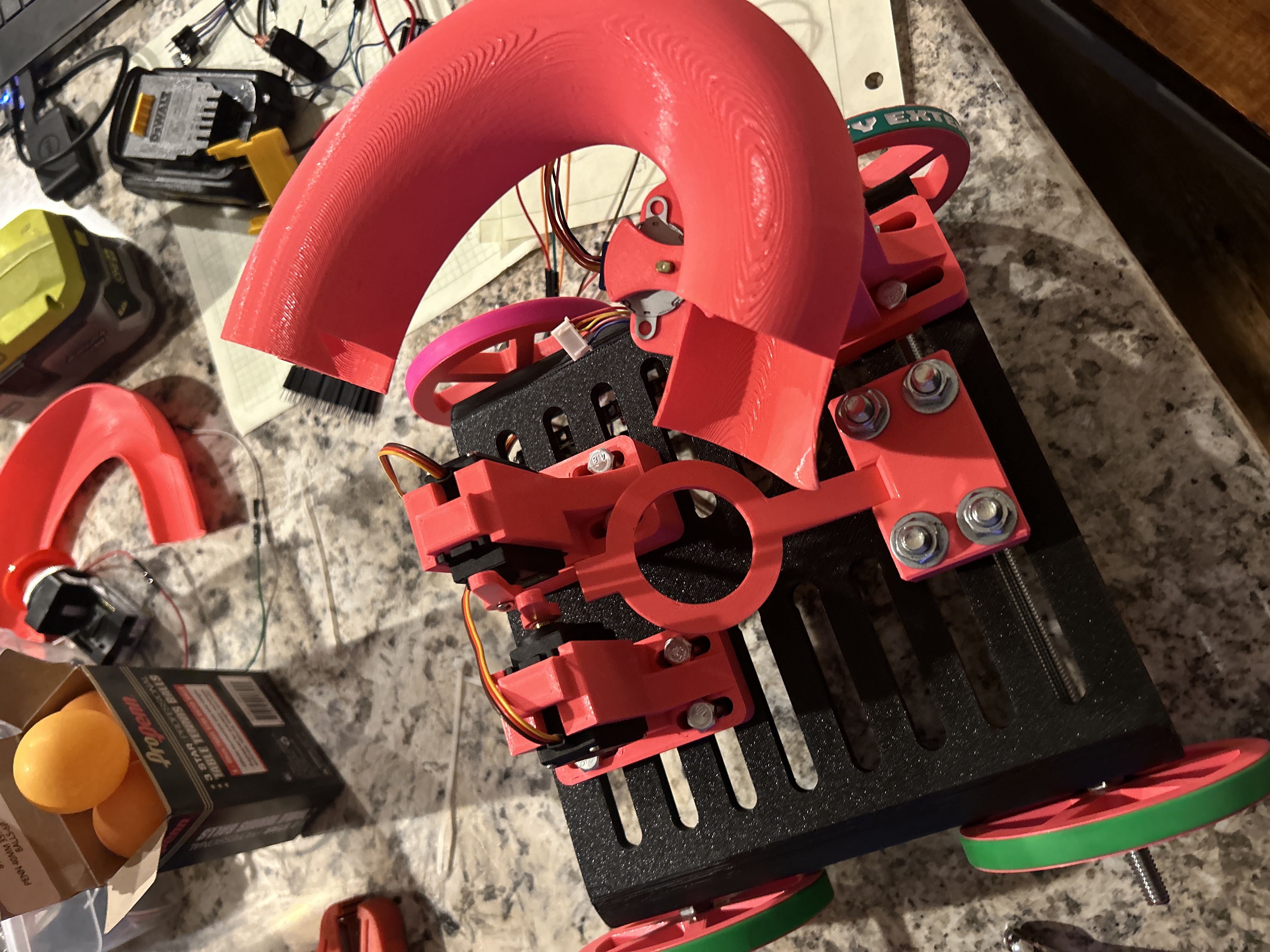

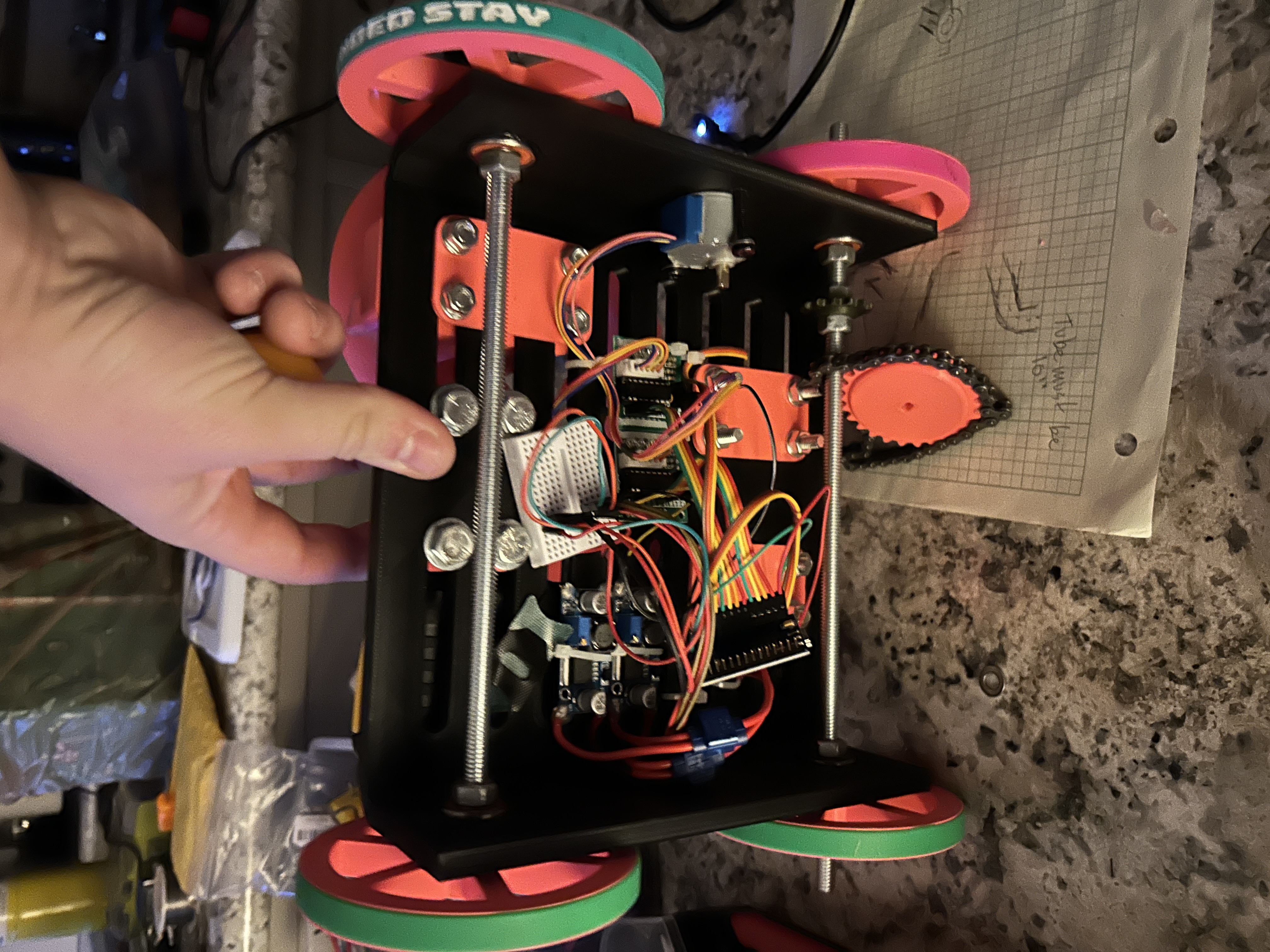
PongBot
Autonomous robot that rolls a set distance, loads, and launches a ping pong ball into cups 10 feet away. Designed for high repeatability with the next version targeting improved alignment hardware.
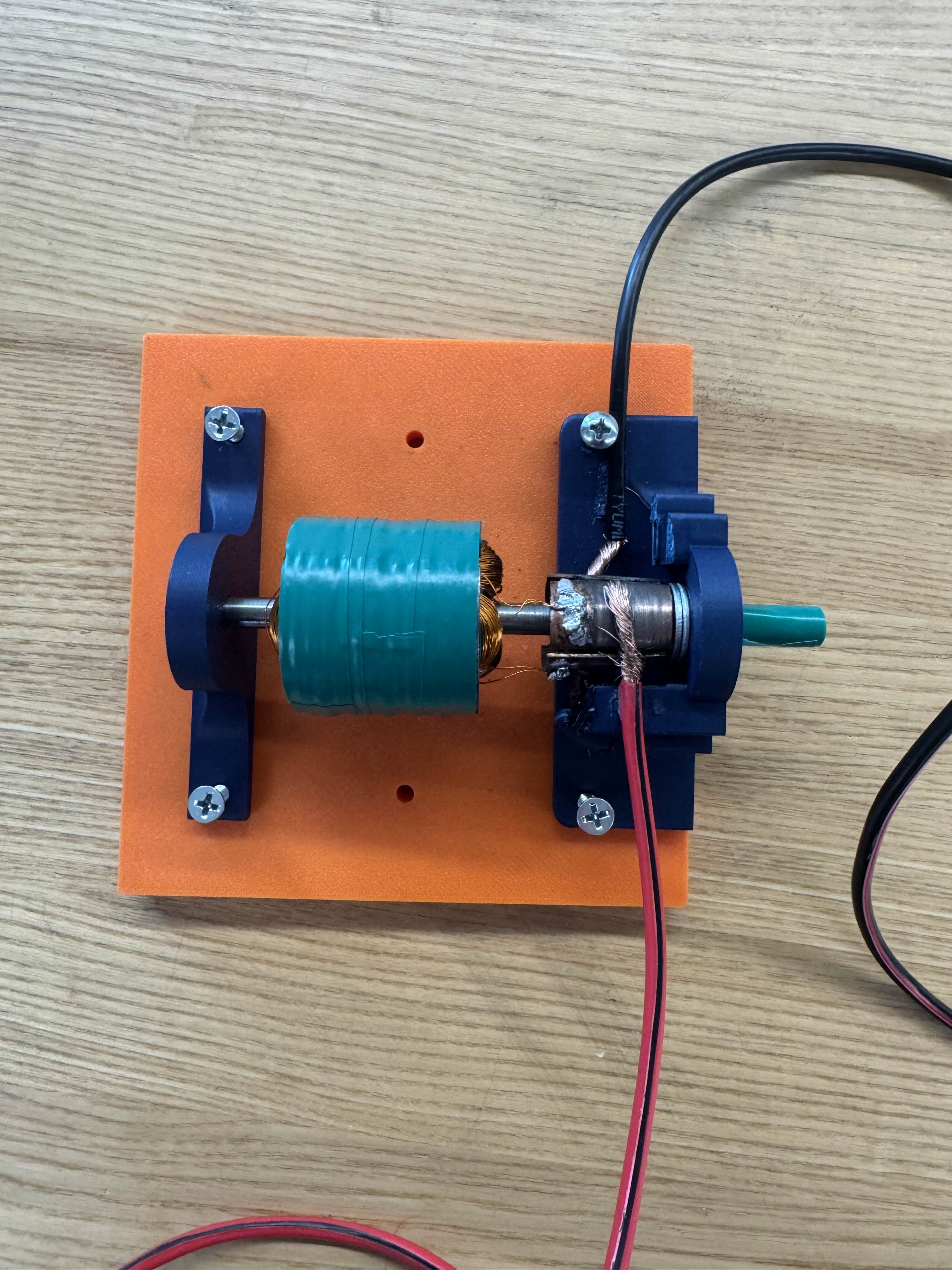
Scratch Built DC Motor
Built a DC motor from raw materials for a class arm wrestling competition. Used a ferrous core instead of plastic, trading peak amperage for superior initial torque.
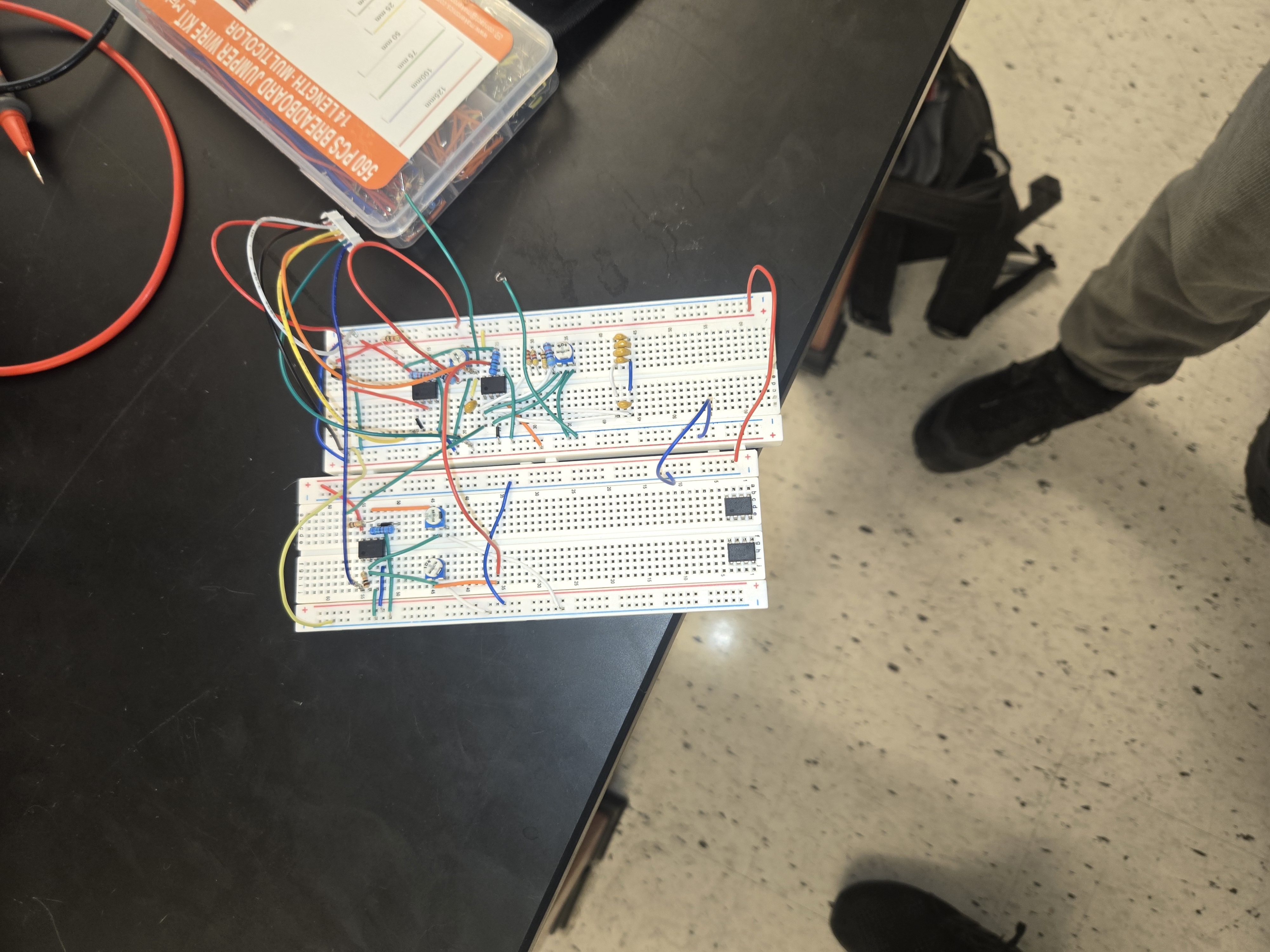
Analog Inverted Pendulum
Purely analog control system using op amps and potentiometers with no microcontrollers to balance an inverted pendulum in under 1 second with less than 5% overshoot.
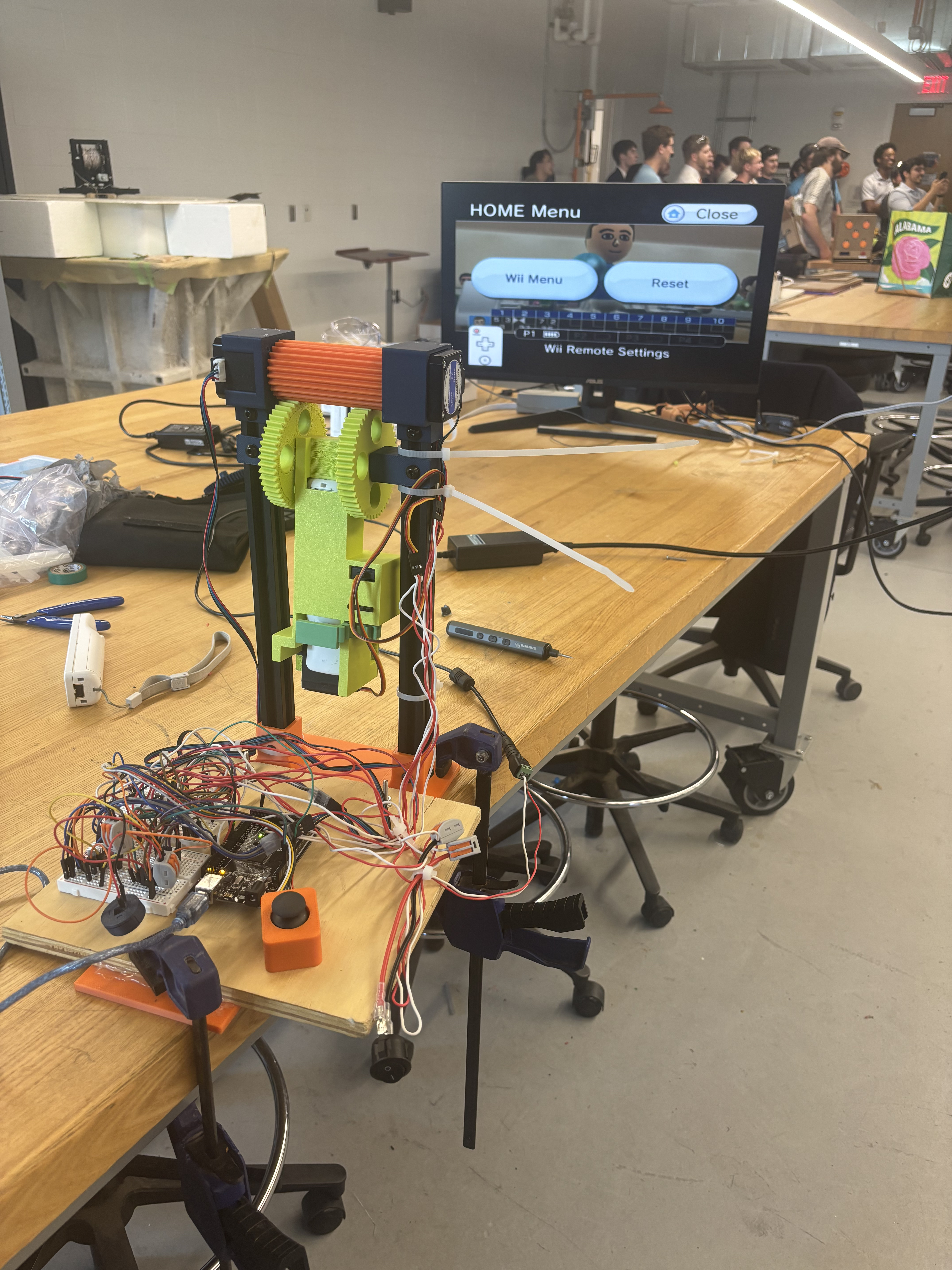
Wii Bowling Robot
Automated robot that plays a full game of Wii Bowling unassisted. The system was designed around mechanical repeatability since consistent ball delivery is the key to a successful throw. Camera guidance was omitted by design and slower ball speed was selected for greater consistency.
Skills and Tools
CAD and Design
Fabrication
Electronics
Software
Additive Mfg
Controls
Austin Revera, Mechanical Engineer
Auburn University 2026